关键词 |
电子产品立体仓库,湖州立体仓库,螺丝螺母五金立体仓库,电缆立体仓库 |
面向地区 |
智能物流是一种的物联网技术现已广泛应用于工业上的分拣、包装、装卸 、搬运、装配等环节,随着机器人技术的快速发展,用机器人来替代人进行工作,不但可以节约人力成本和减少搬运不当对人造成的伤害,而且可以提高工作效率和质量。
本文创新性地集成了自动化立体仓库、AGV、复合机器人及双臂机器人等智能设备,设计了一套智能机器人仓储物流系统,同时开发了总控调度软件,实现了各设备的稳定立有序运行。针对AGV定位不准确的问题,本文提出一种二维码视觉定位方法,从而提高了仓储物流系统的稳定性。

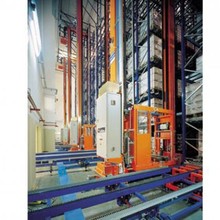
综合考虑智能机器人仓储物流系统工作流程,机器人的转弯半径、工作空间、场地等多方面约束,进行智能机器人仓储物流系统布局设计,其布局如图7所示,图中虚线表示叉车 AGV 的运行路线,粗实线表示复合机器人的运行路线,细实线为平台式AGV的运行路线,两台平台式AGV交替工作。复合机器人与叉车AGV在转接台处完成取放货,复合机器人与平台式AGV在转接处完成对接。

旋转处理模型
旋转处理即以中心点为旋转参考点,旋转修正,如图10a所示。设定P0(x0 ,y0) 为轮廓中心点坐标,B(x23 ,y23)为待修正后矩形一边的中心点坐标, A(x'23,y'23)为修正后矩形一边的中心点坐标。根据P0和B点坐标求得A点坐标,如式(3):
| 主营行业:仓储设备 |
| 公司主营:自动仓储货柜,立体货柜,智能货柜,智能升降货柜 |
| 主营地区:上海 |
| 企业类型:私营独资企业 |
| 公司成立时间:2021-04-23 |
| 经营模式:生产型 |
| 公司邮编:200001 |